在这里了解千眼狼最新动态
1实验背景
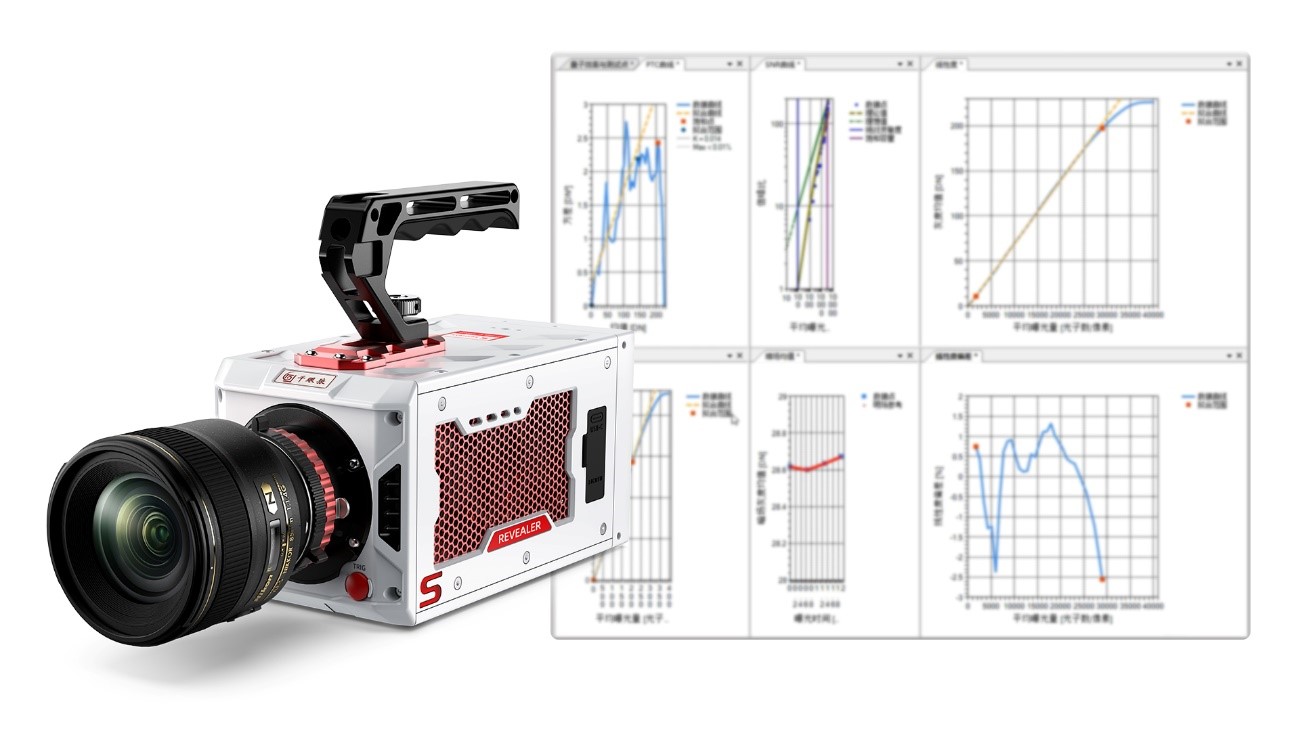
千眼狼研发工程师们,自主研发局部DIC-GPU算法,针对自研的DIC软硬件生态深度优化。研发人员通过开展几组经典实验,并与开源GPU算法进行横向对比。
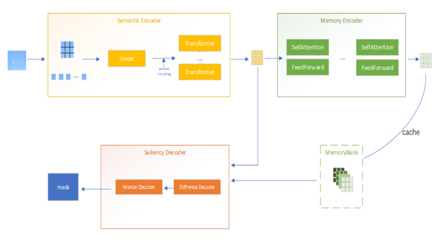
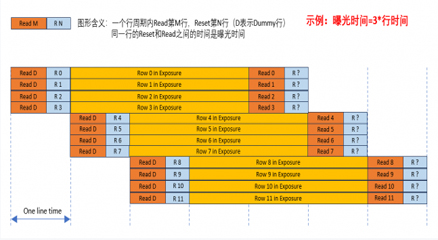
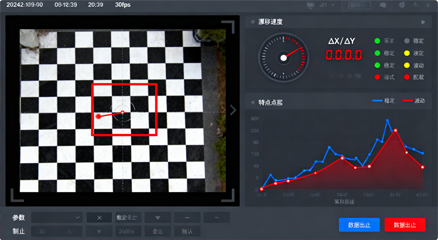
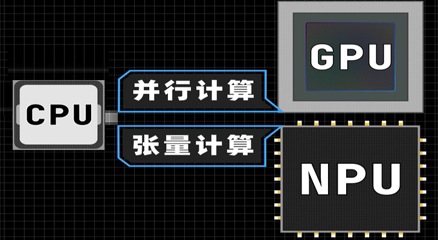
2技术原理
3实验验证
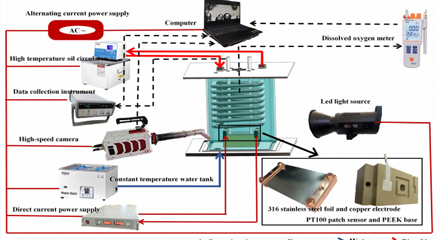
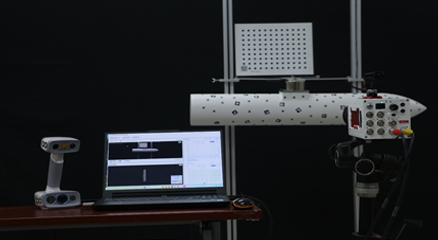
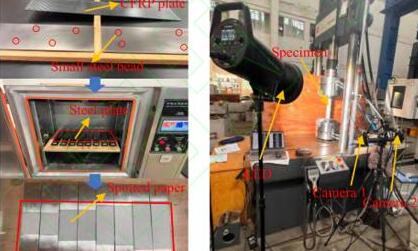
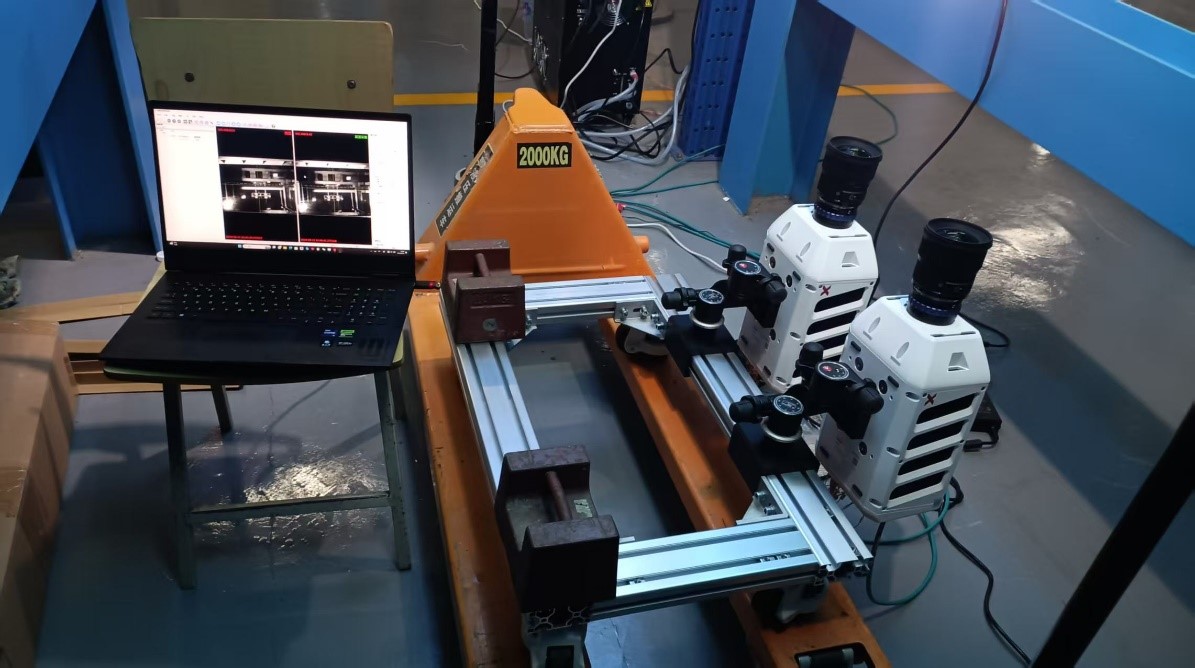
为验证实际效果,千眼狼工程师设计了六组实验,实验基于同一测试环境GPU 4070开展:
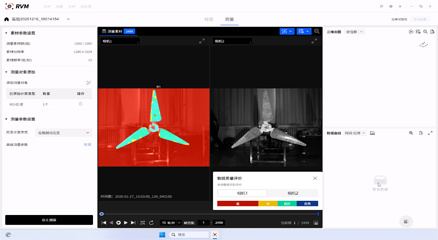
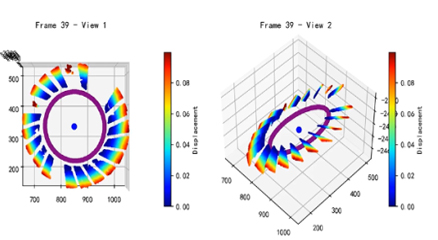
场景1 仿真旋转
数据规模:有效子区个数0.4W
计算结果:左 开源算法耗时160ms,右 自研算法耗时仅54ms

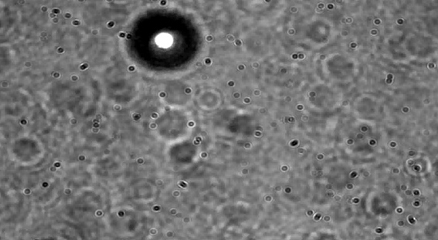
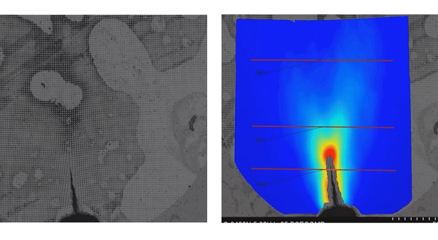
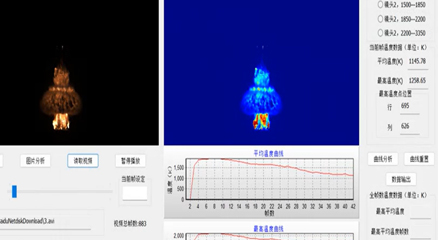
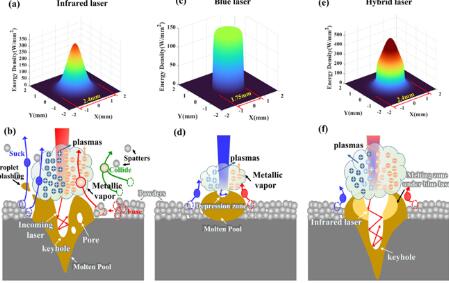
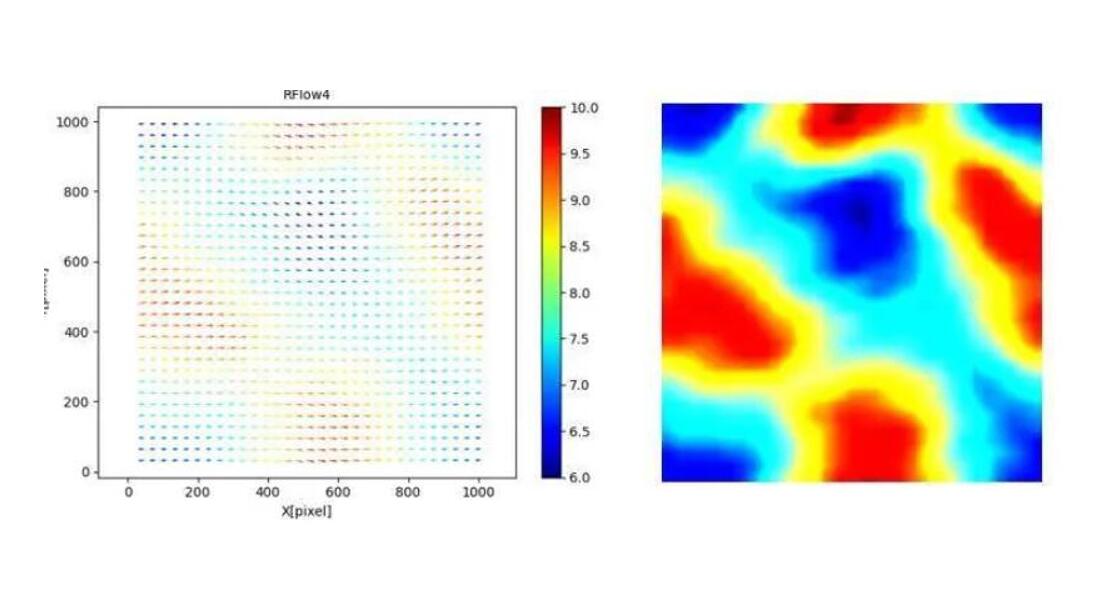
场景2 仿真辐射
数据规模:有效子区个数1.7W
计算结果:左 开源算法耗时696ms,右 自研算法耗时仅85ms

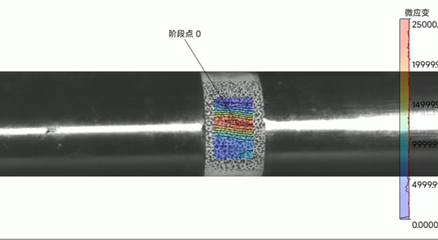
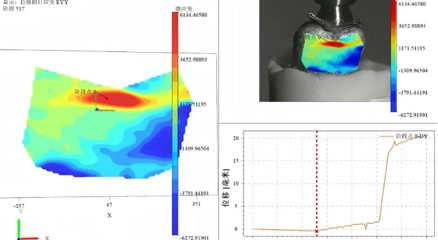
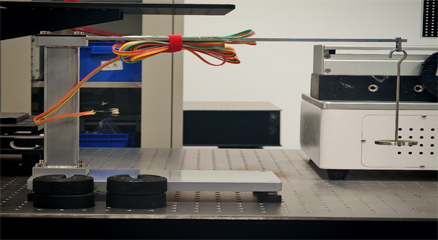
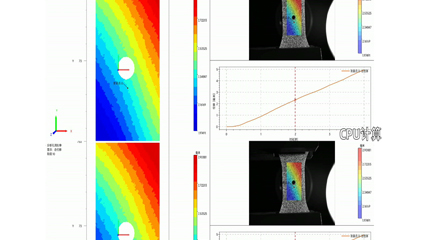
场景3 圆杆拉伸
数据规模:有效子区个数0.3W
计算结果:左 开源算法耗时826ms,右 自研算法耗时仅64ms

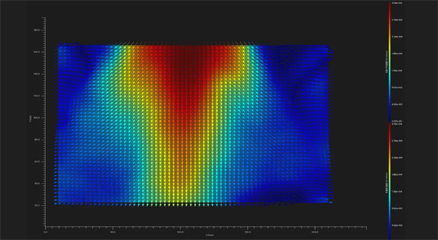
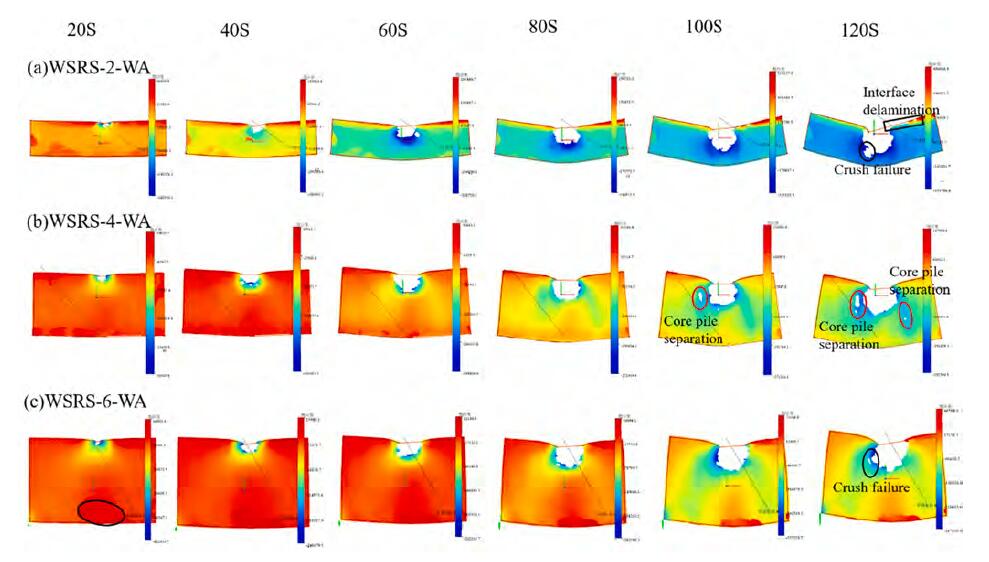
场景4 三点弯
数据规模:有效子区个数0.7W
计算结果:左 开源算法耗时2011ms,右 自研算法耗时仅109ms

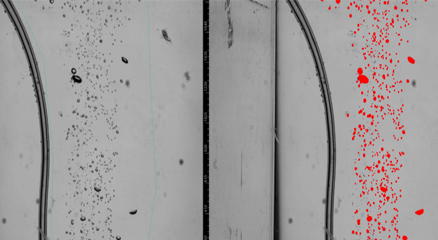
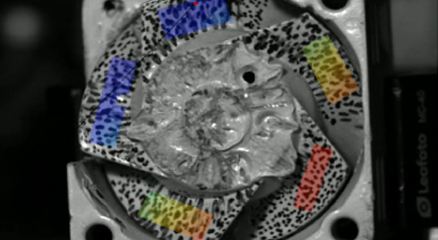
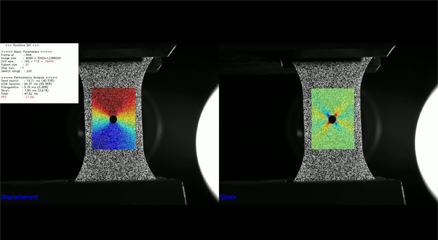
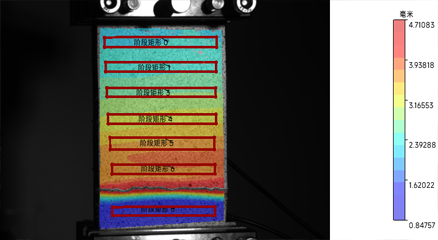
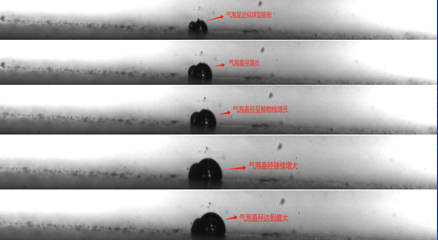
场景5 孔洞拉伸
数据规模:有效子区个数3.2W
计算结果:左 开源算法耗时2755ms,右 自研算法耗时仅148ms

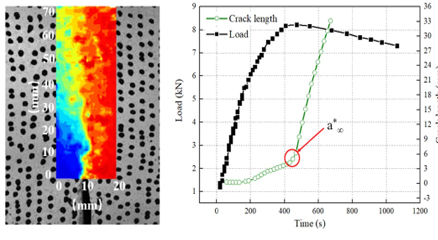
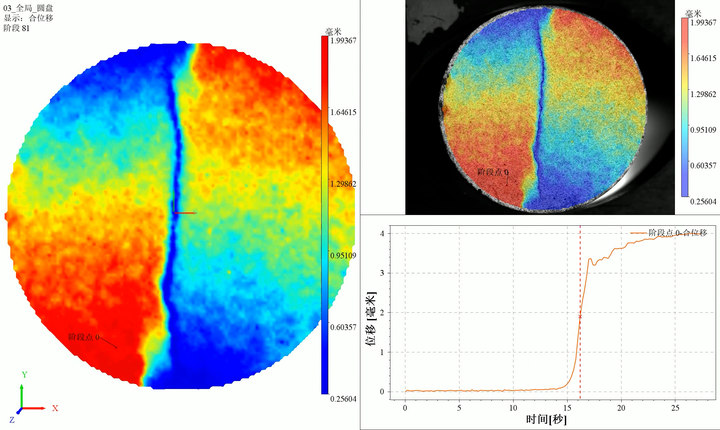
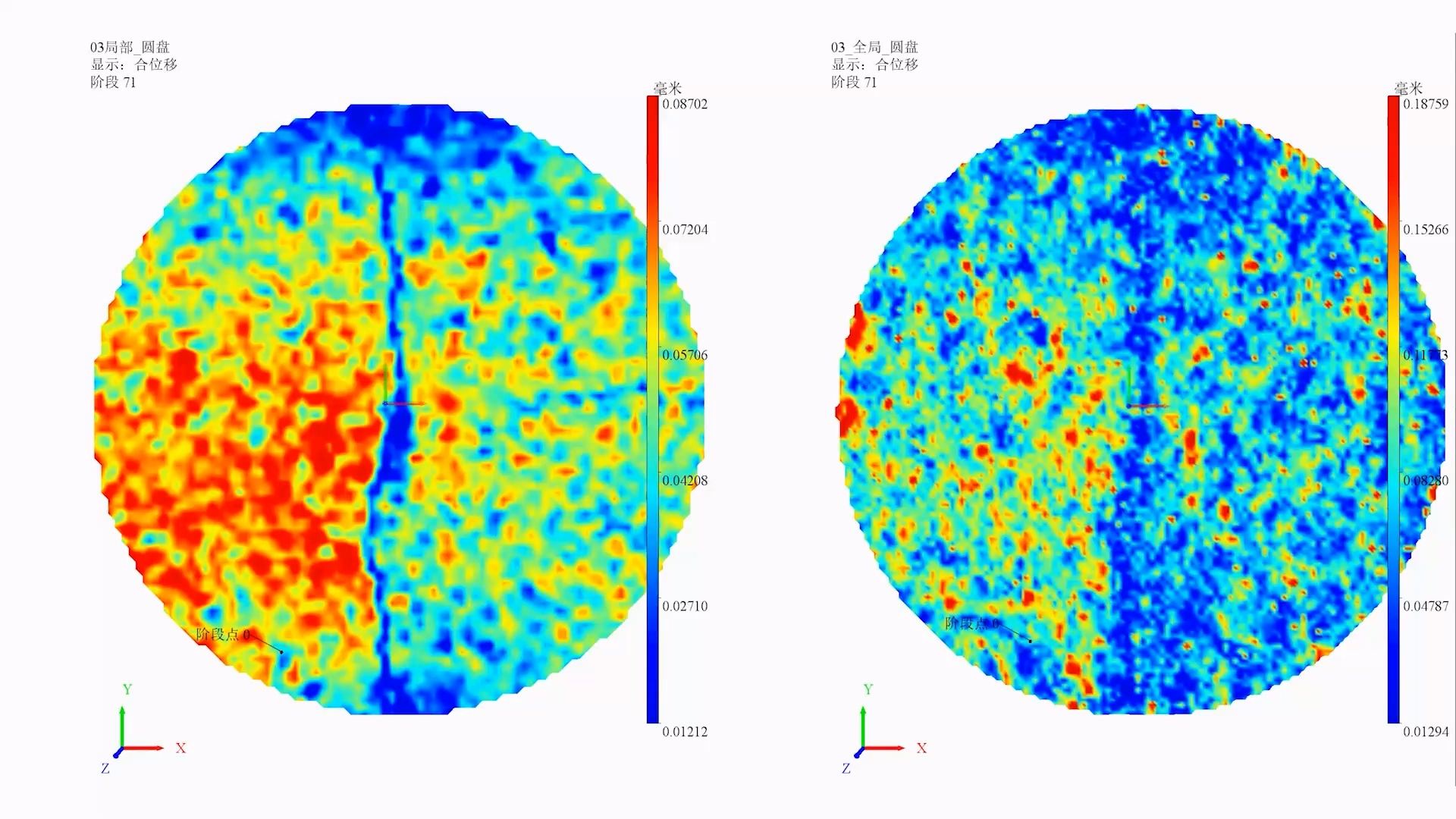
场景6 拉伸裂纹
数据规模:有效子区个数6.6W
计算结果:左 开源算法耗时3855ms,右 自研算法耗时仅217ms

六大实验场景耗时对比
千眼狼自研GPU加速算法较开源GPU 提速3–18倍,且子区规模越大优势越显著。如圆杆拉伸0.3W子区提速3倍,6.6W子区拉伸裂纹场景提速18倍。

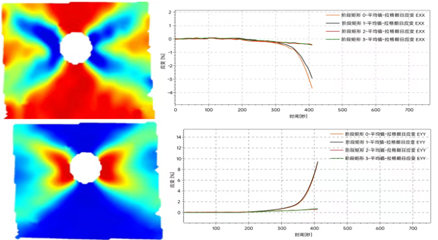
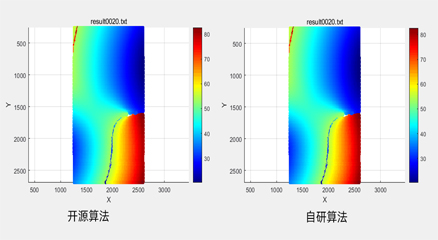
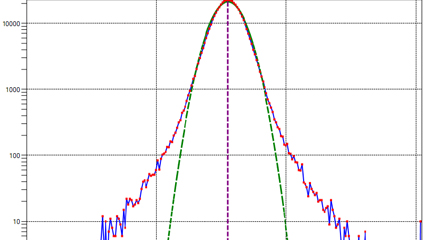
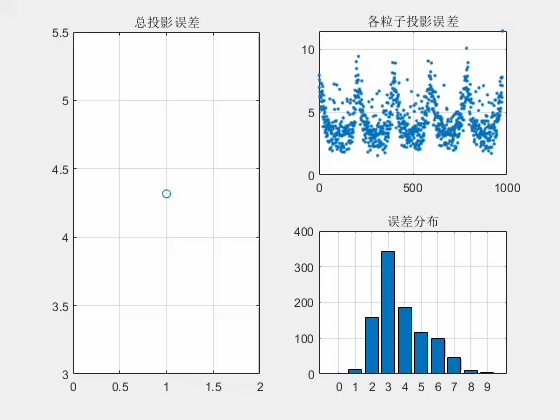
六大实验场景精度对比
千眼狼工程师们使用带有位移真值的仿真素材做精度对比,素材位移真值为振幅衰减的正弦函数,绘制自研GPU计算结果、开源GPU计算结果和位移真值曲线如下:

将两组计算结果与真值的平均绝对误差和均方根误差如下:

4实验结论
通过上述实验对比,千眼狼自主研发的局部DIC-GPU算法与开源GPU算法在精度一致的前提下,在效率、适用性、稳定性上有较大提升。
1)效率:实现了较开源算法同计算场景下的3~18倍的提升。
2)适用性:涵盖从仿真到实拍不同场景,可高效处理万级以上子区。
3)稳定性:计算结果与开源方案误差≤0.03pixel,满足科研级精度需求。
5实验展望

微信公众号

官方抖音